Github
The source code of all ROS2 packages developed in this project are available in this repo. The readme contains detailed documentation and diagrams.
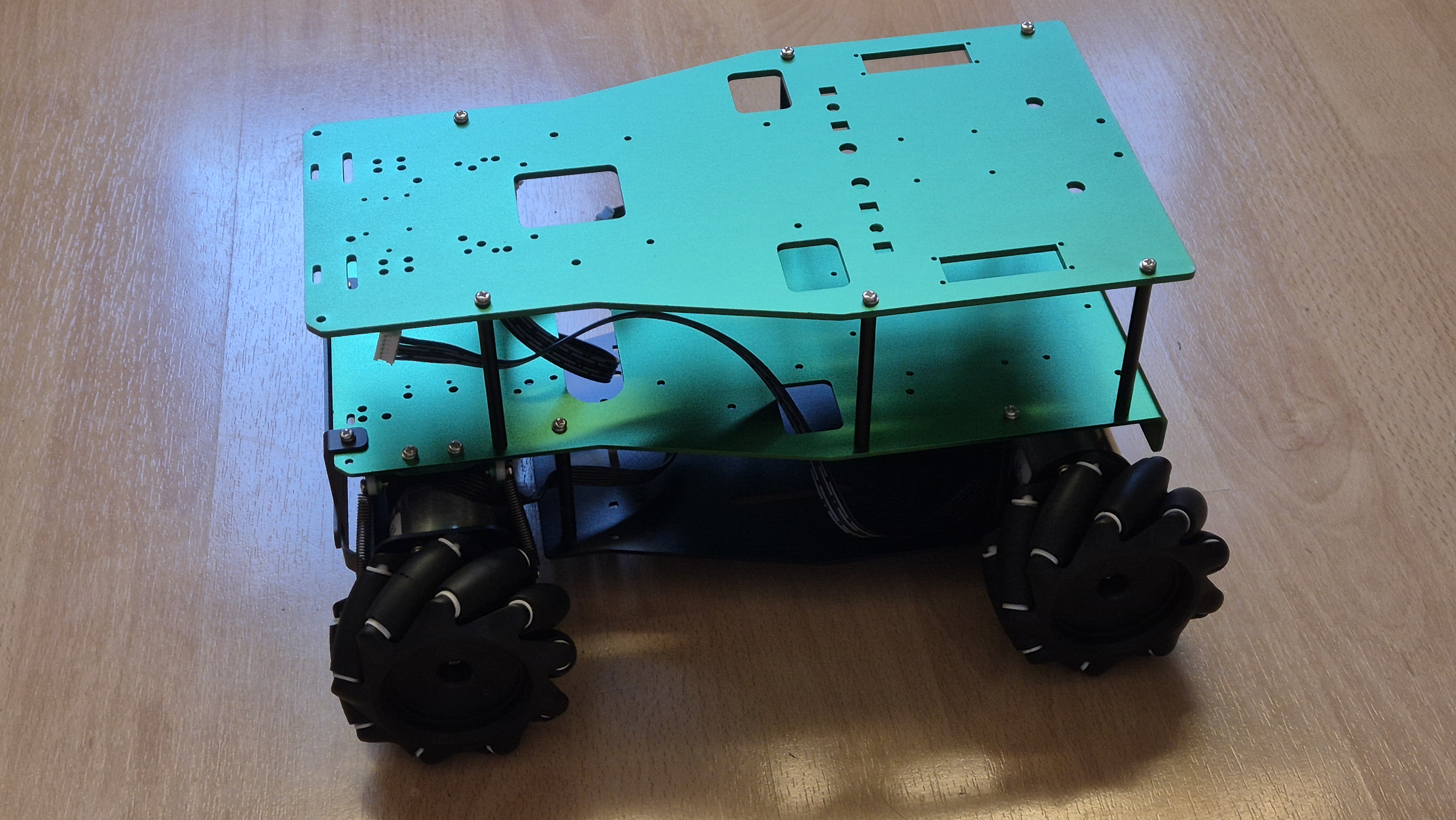
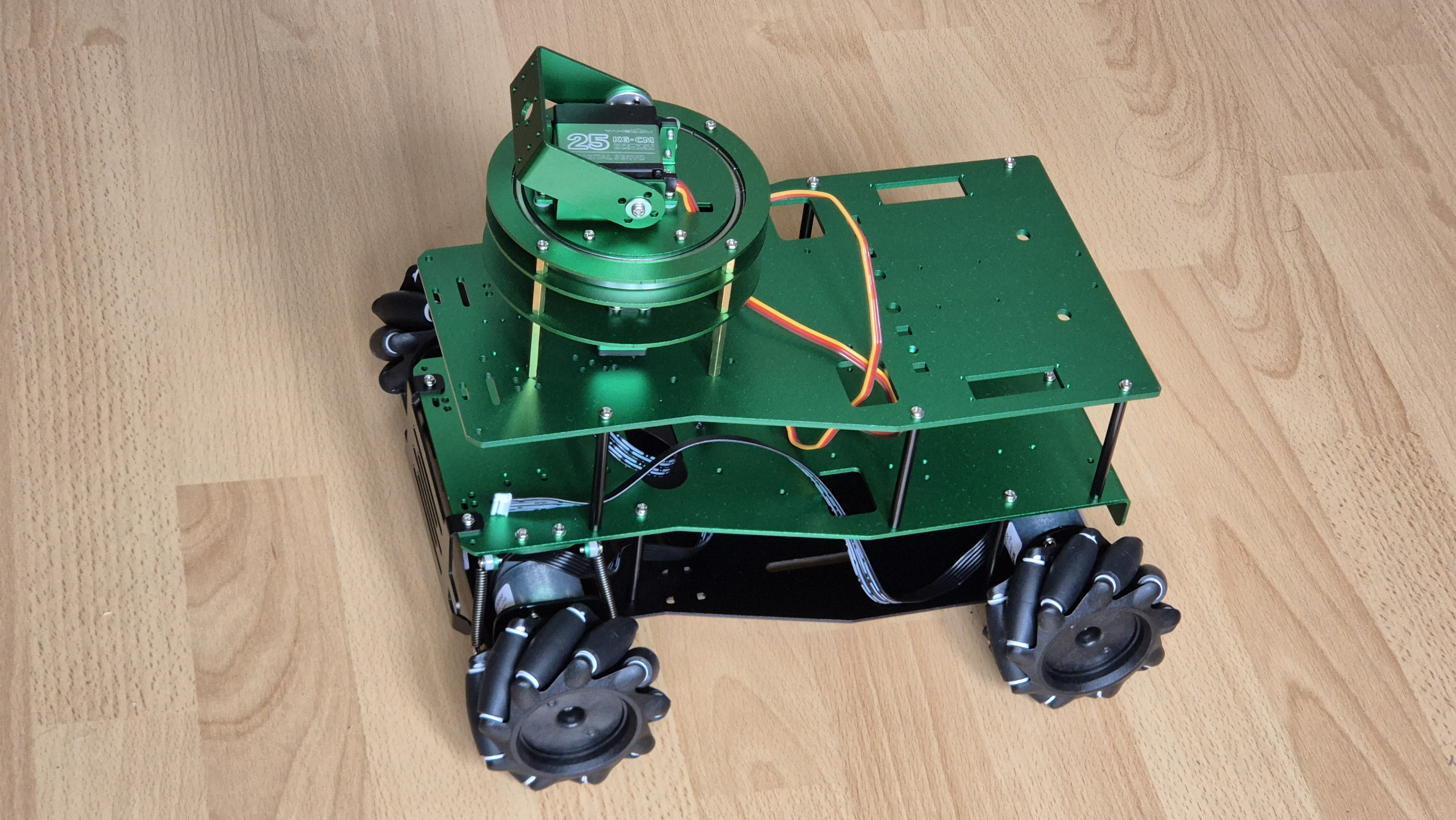
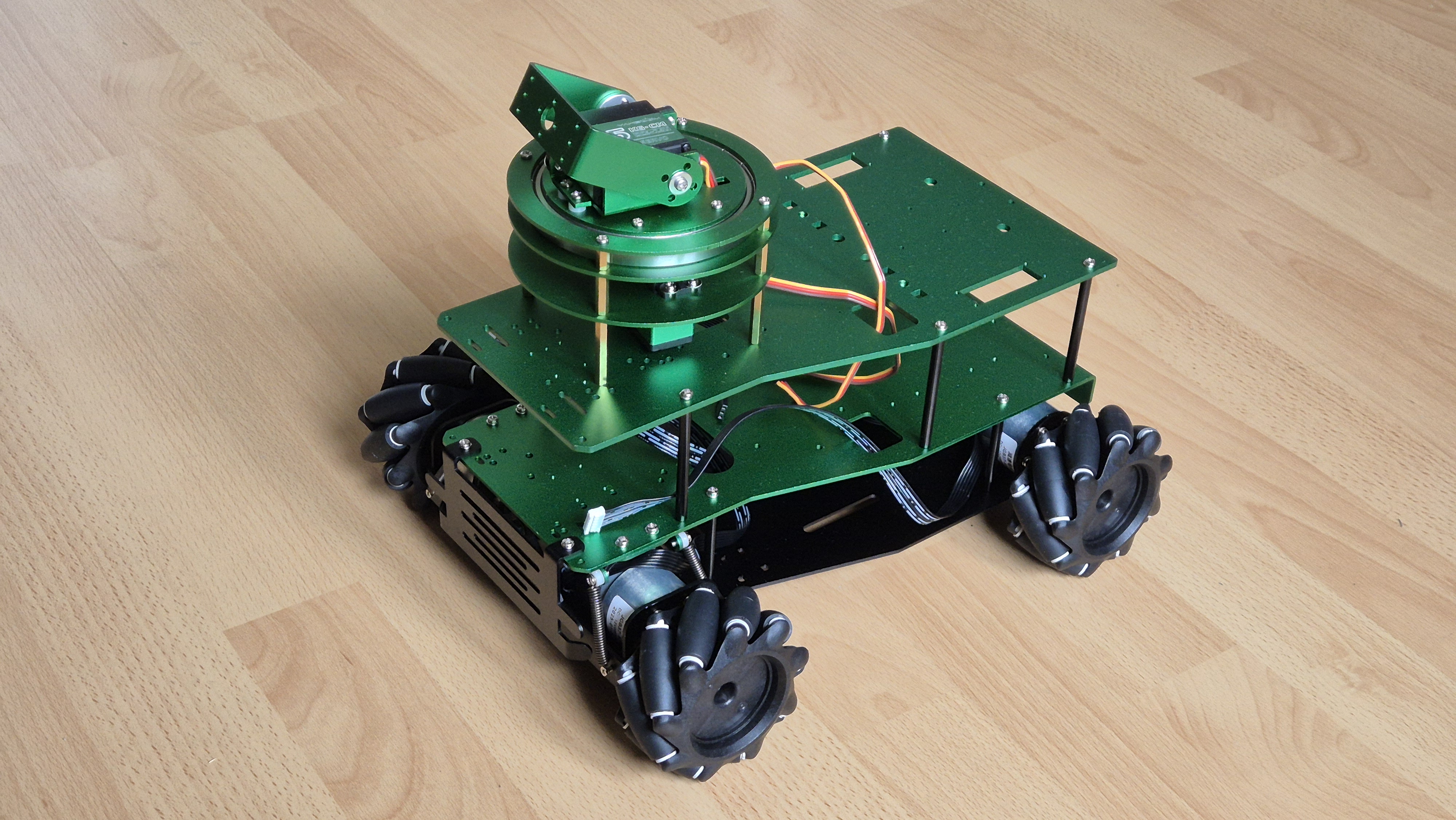
Description
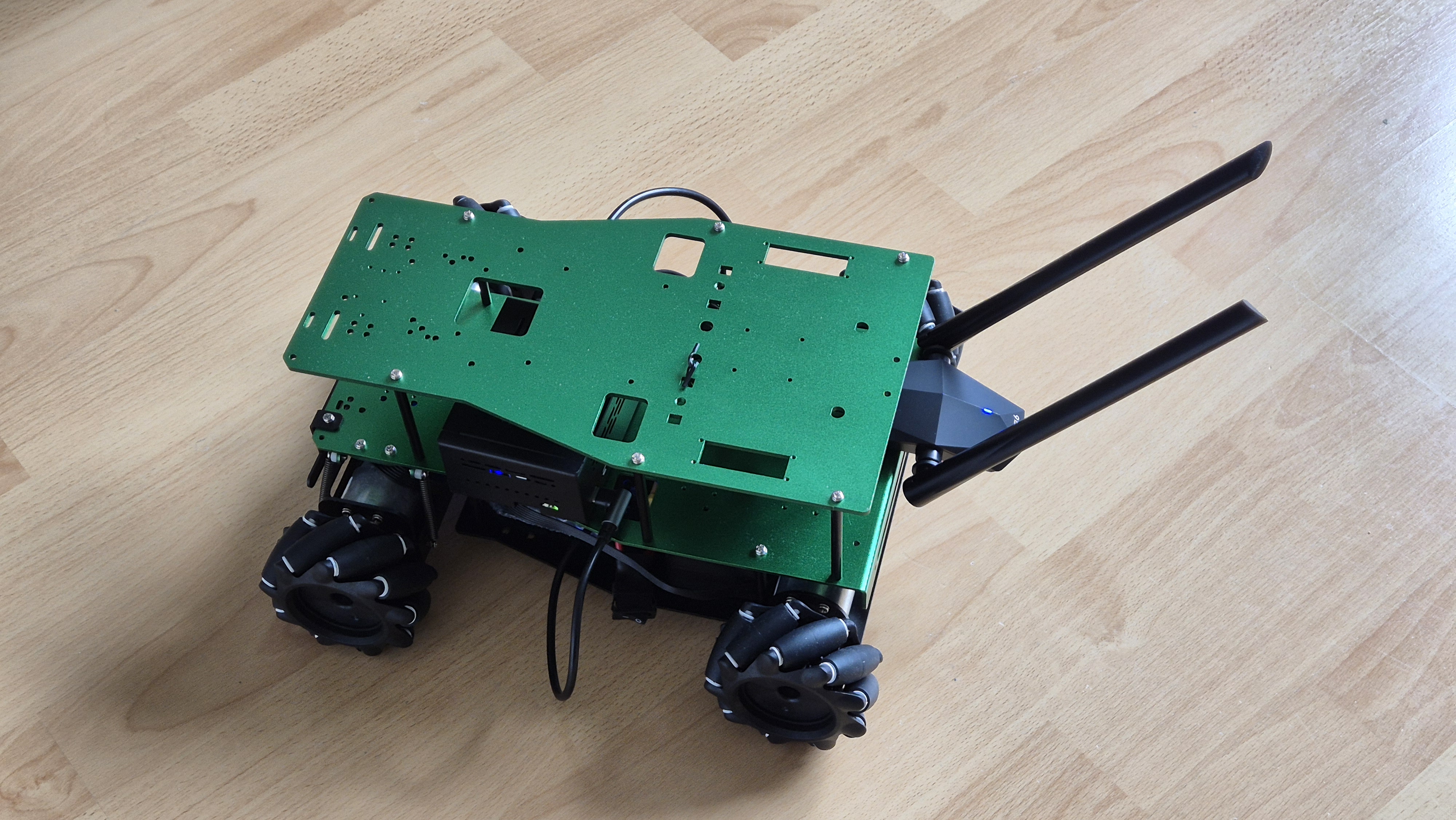
A car robot platform based on the Yahboom Rosmaster X3-Plus mecanum chassis, customized sensors and fresh new ROS2 Jazzy software for native ubuntu 24 development (no docker) on Raspberry pi 5
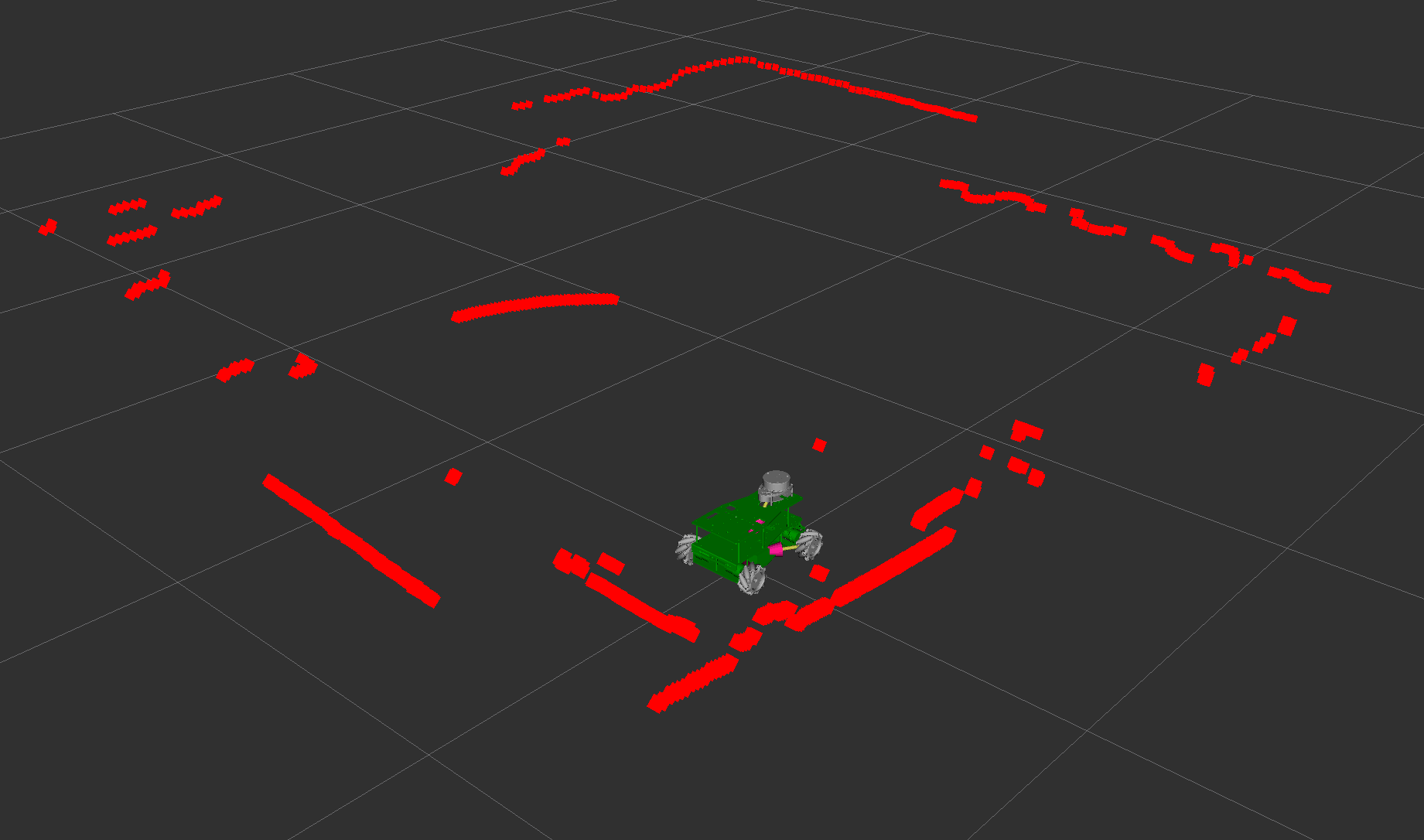
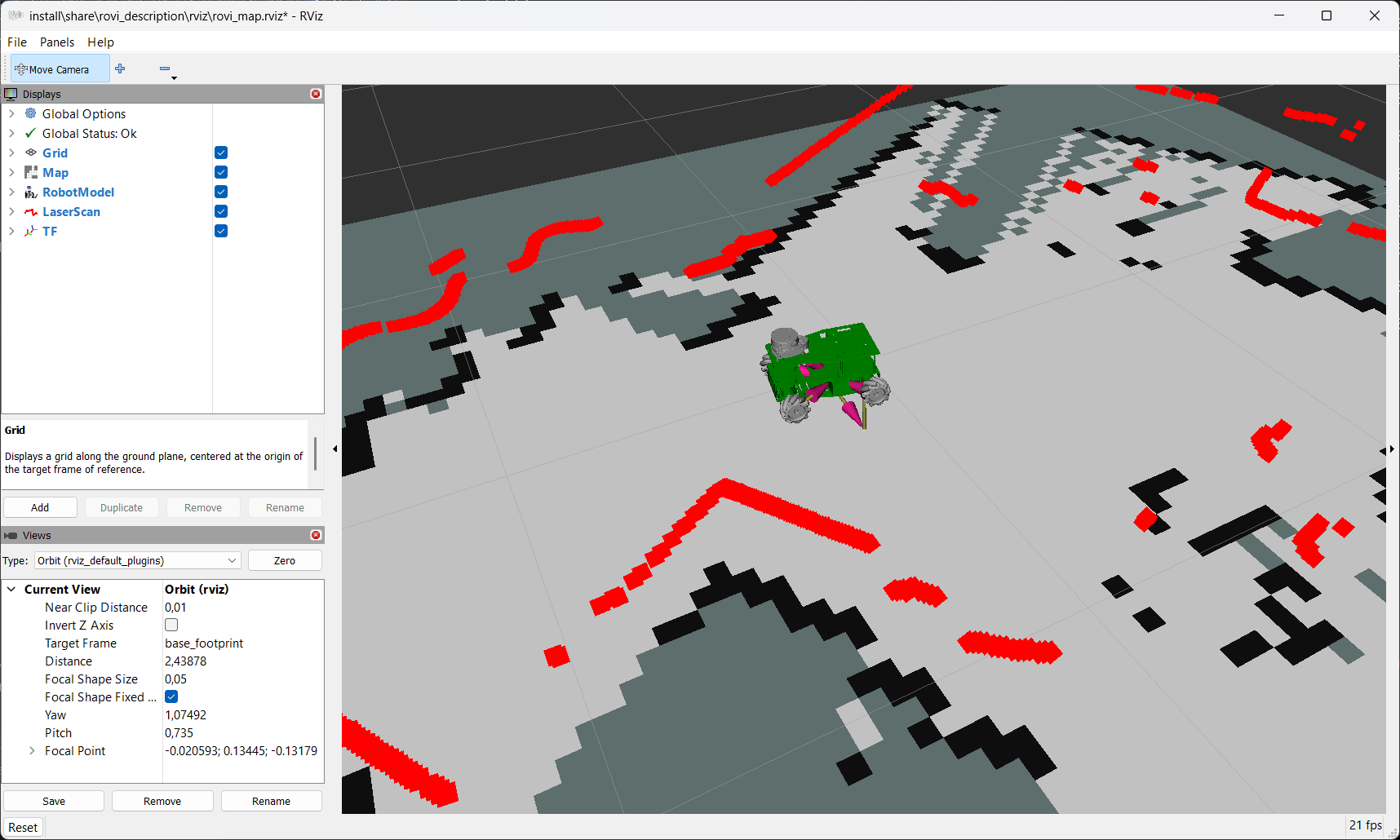
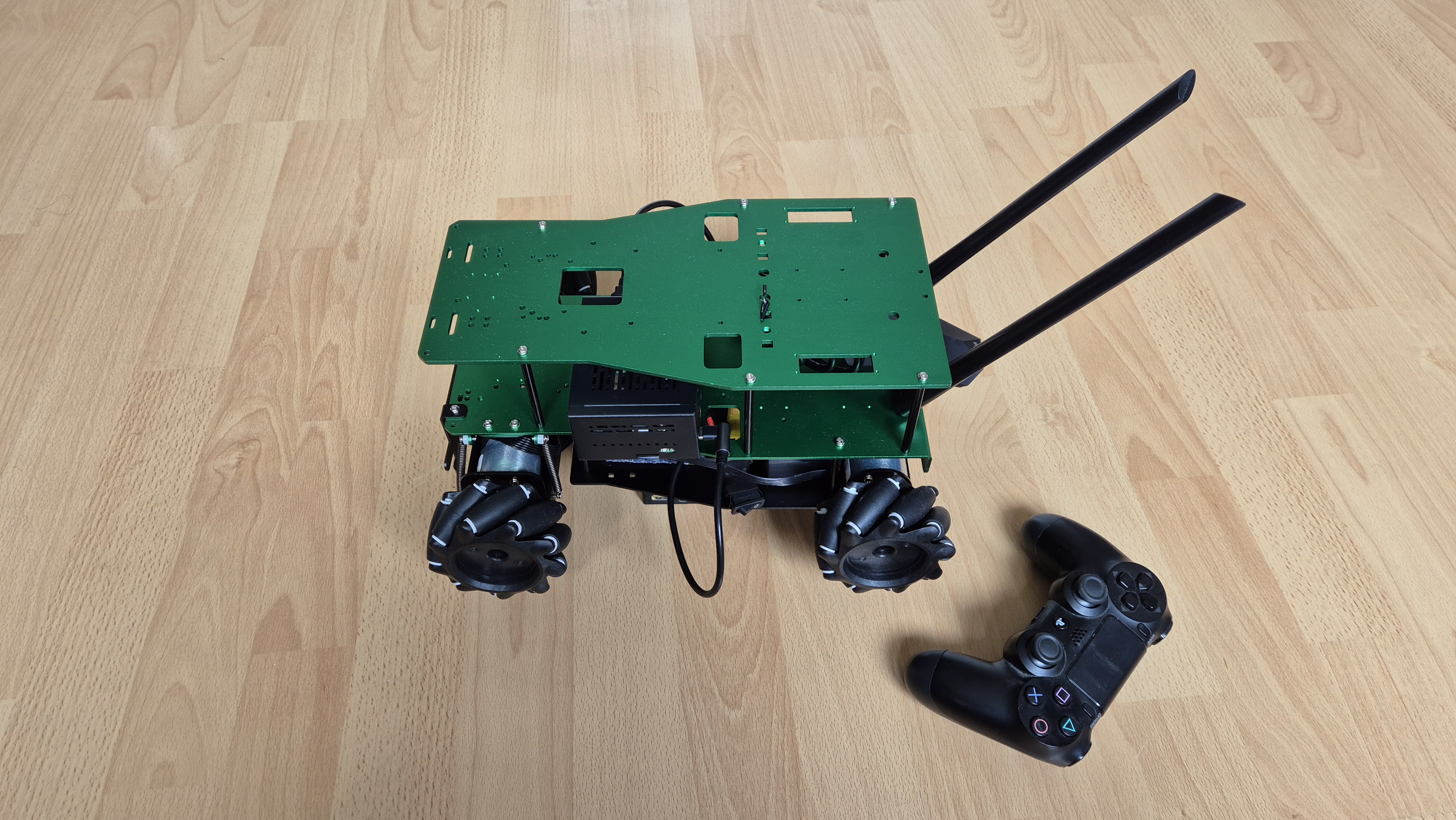
Video from the latest development stage. The robot can navigate to a goal while building a map with SLAM, control can also be overriden from a Joystick.
This video below demonstrates the Mecanum wheels omnidirectional capabilities
Steps
This robot will be built in stage with progressive functionalities
| version | status | Description | Peripherals | Batteries | USB |
|---|
USB Peripherals
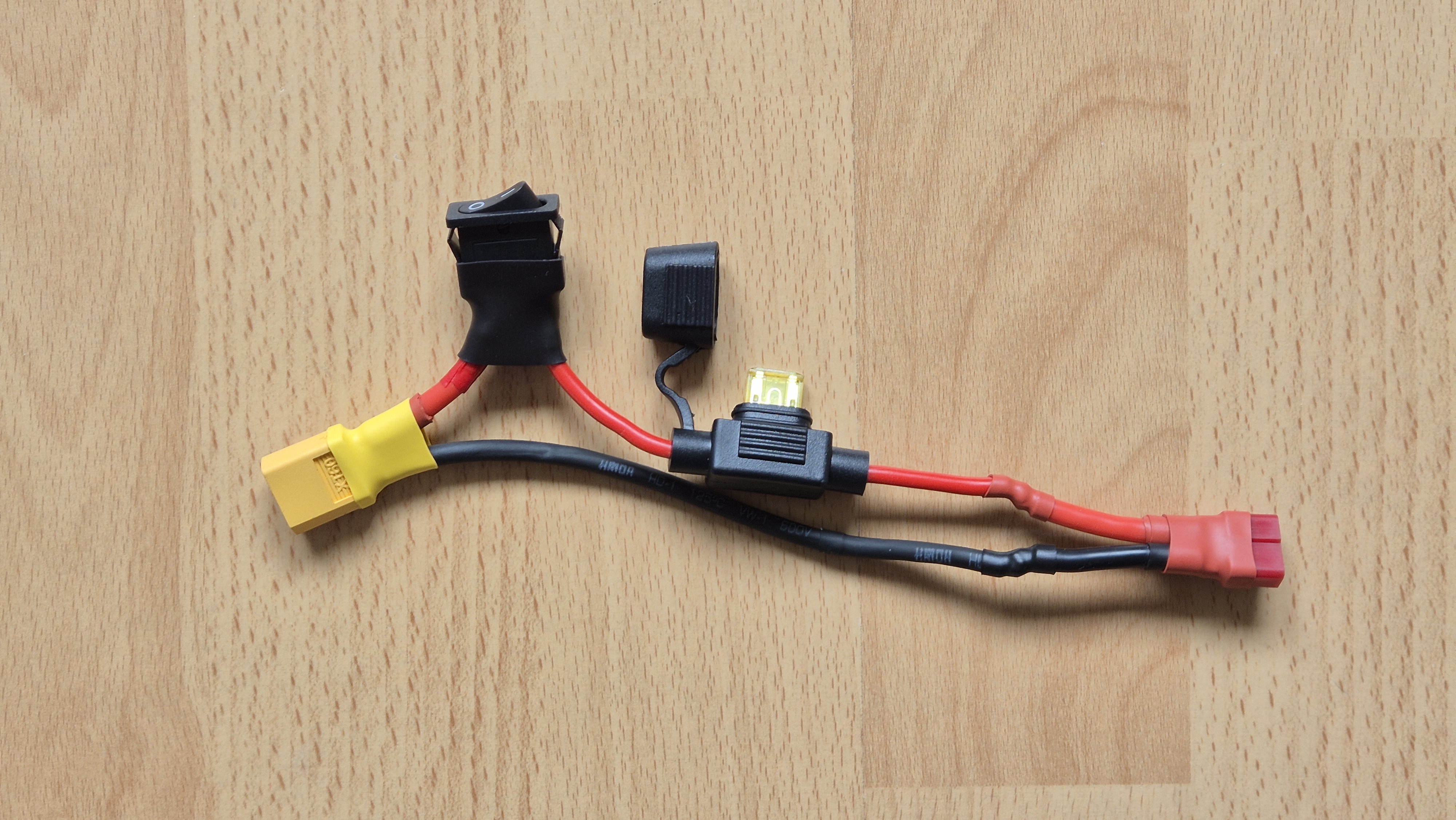
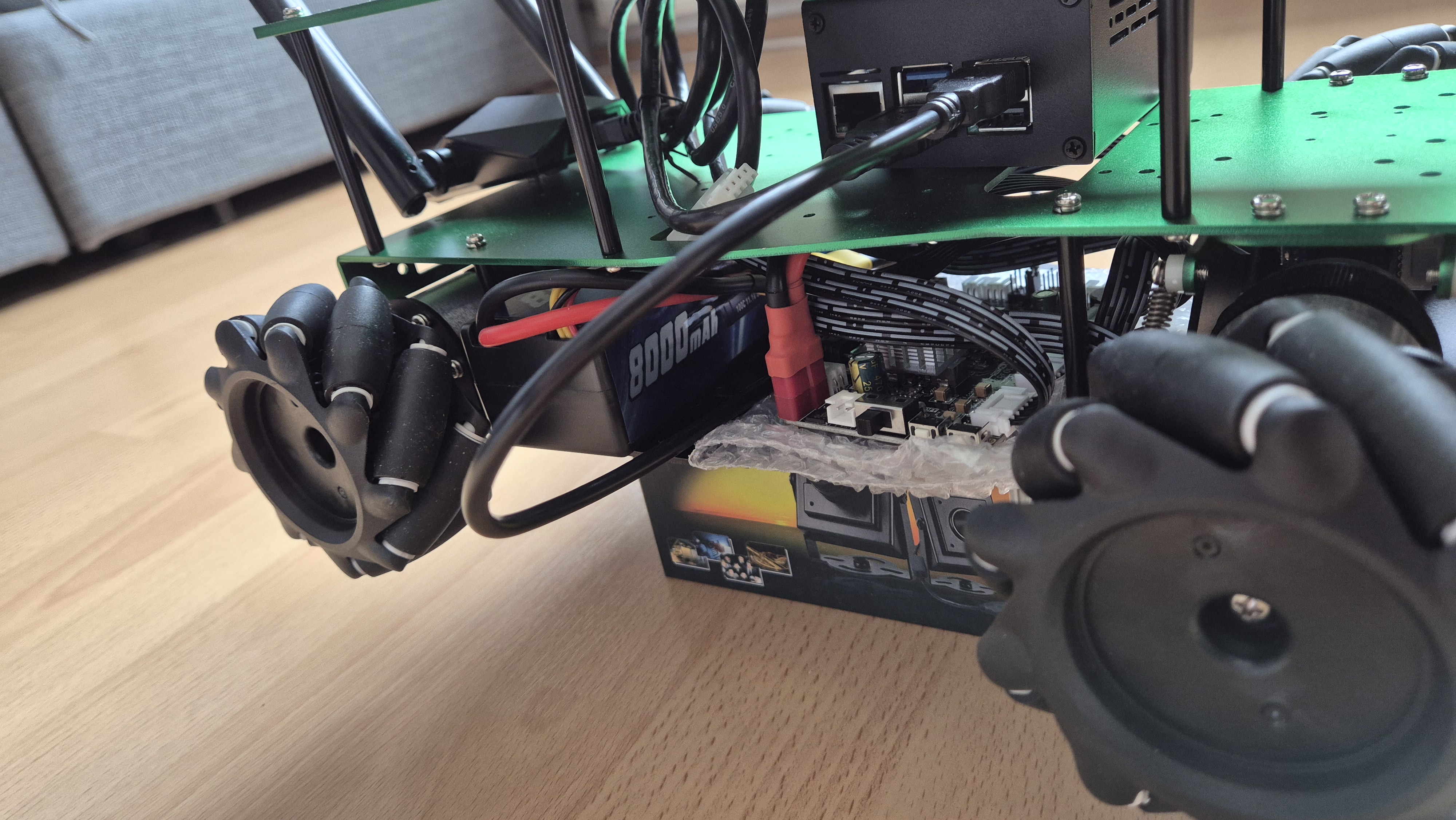
In order to extend the robot runtime, in addition to the the 12_V motors board battery, a second USB power bank is used to power the Raspberry Pi 5 and its USB peripherals.

×
The Raspberry Pi 5 could draw 5V@5A profile, but the max a USB power bank can deliver @5V is 5V@4.5A which is not a big difference. We also notice that if we power the USB Hub, we can fully cover the maximum power the Raspberry Pi 5 could draw.
- Without drawing power from the Pi USB, it runs at 3 W when idle and could reach a max theoretical of 15 W
- Weger Power Bank 20000 mAh can deliver 22.5 W and has 5V@4.5A on x2 USB outpus and 5V@3A on USB-C
- Acer USB-3 Hub draws the USB profile 5V@2.5A so a theoretical of 12.5W but in practice ~ 5.2 W would be needed
BOM
The Bill Of Material consist of the following items
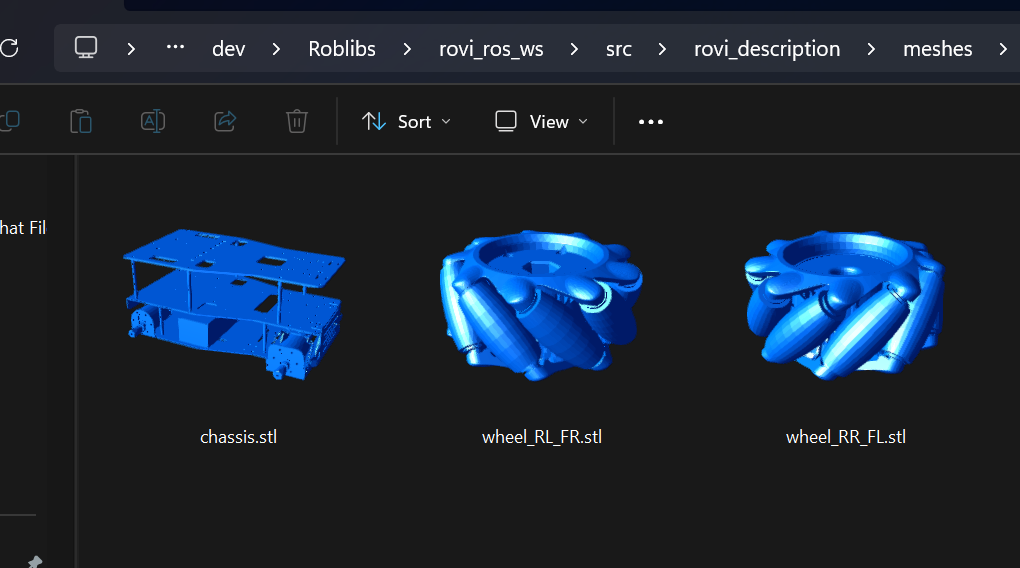
chassis
Chassis with Mecanum Wheel(L)

- yahboom learn ROS-chassis
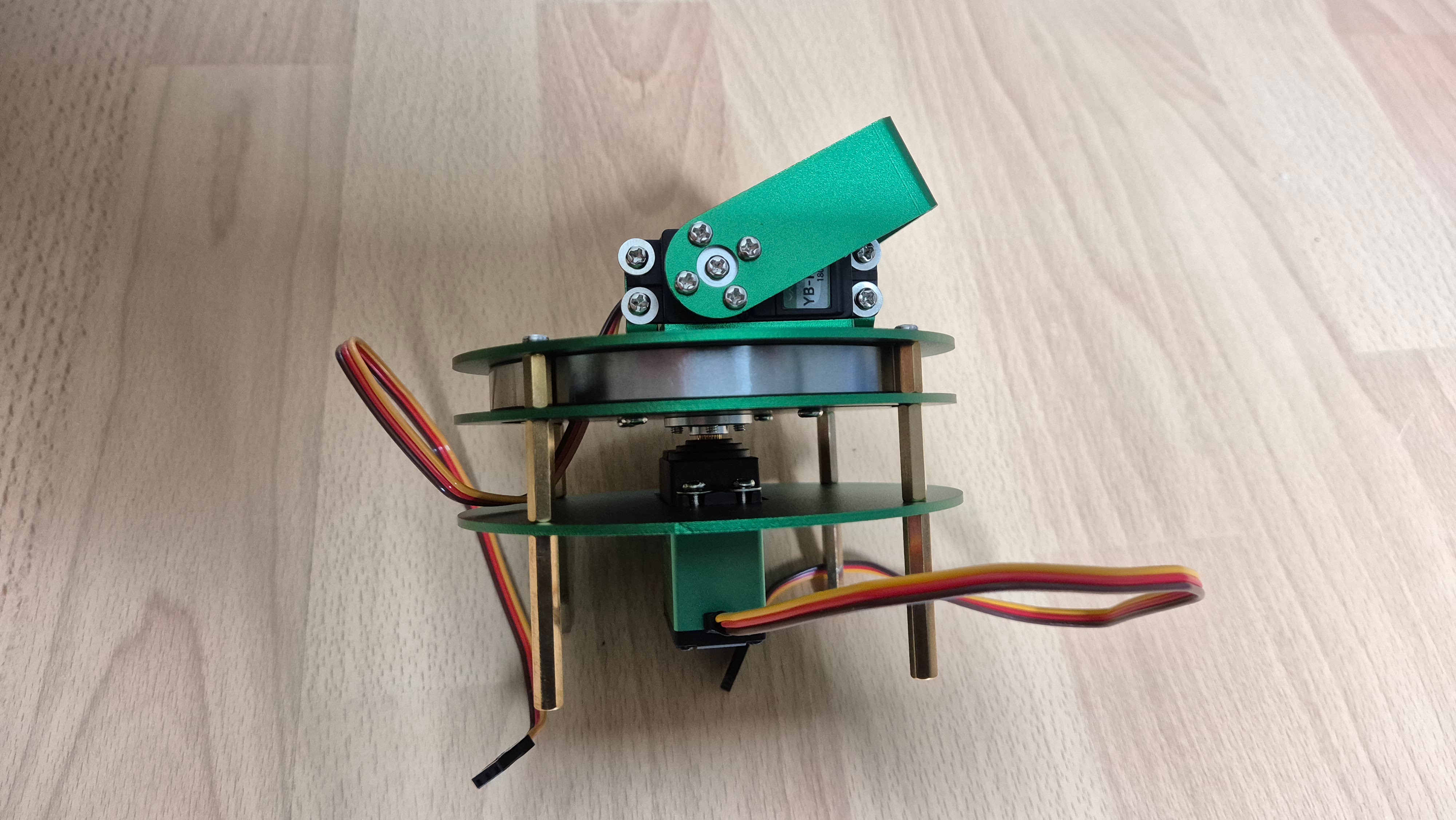
depth camera
The depth camera is a raw camera without a case provided by Orbbec under the name
Astra Stereo S U3, Yahboom is rebranding it under the name AI View Depth Camera and did a great work in providing a metal case with an adjustable tilt very important for robotic usage.

The various naming of this camera when detecting it on USB migh be confusing as the camera is detected as two devices:
Bus 004 Device 005: ID 2bc5:0511 Orbbec 3D Technology International, Inc USB 2.0 Camera
Bus 004 Device 006: ID 2bc5:0614 Orbbec 3D Technology International, Inc ORBBEC Depth Sensorand these devices have rules in the
OpenNI Modules section of the Orbbec OpenNISDK- pid 0614, vid 2bc5 :
gemini - pid 0511, vid 2bc5:
gemini_rgb
Links
- yahboom product aiview-depth-camera
- yahboom learn AI View Depth camera
- Orbbec store Astra Stereo S U3
- Orbbec OpenNI SDK : https://github.com/orbbec/OpenNI_SDK
Python Bringup testing
before starting with ROS2, every function of the robot is tested separately with native drivers and as few softwre layers as possible.
Testing the ROS Control board with unitary python scripts, then with a joystick.
ROS Workspace
An overview of the ros packaegs and the exchanged topics
×
Gallery