An Ultra-Wide-Band networks can form a mesh network, in addition, the main feature is the RTLS: Real-Time-Locating-System capability.
This pages covers the
meshposition Open Source UWB Framework, provide links to UWB Hardware then covers the existing software with a Survey that has focus on Fee and Open Source Framwrorks. For Closed Source and commercial Software it is possible to refer to the official Decaware/Qorvo Partners. Mesh Position Framework
×
Free support for any question related to this project is available on the project's forum category :
There is no such thing as UWB position, UWB only provide ToF and range, therefore experimenting with different positioning algorithms can now be offloaded to a server environment with high performance. Also in case the uwb ranging is not working, and your solution is based on a balck-box closed source, there's no way to figure out what the problem is, therefore being able to perform diagnostic between any two nodes with the same firmware running the ranging function is important to keep a live status of your uwb network.
From these two ideas is born this
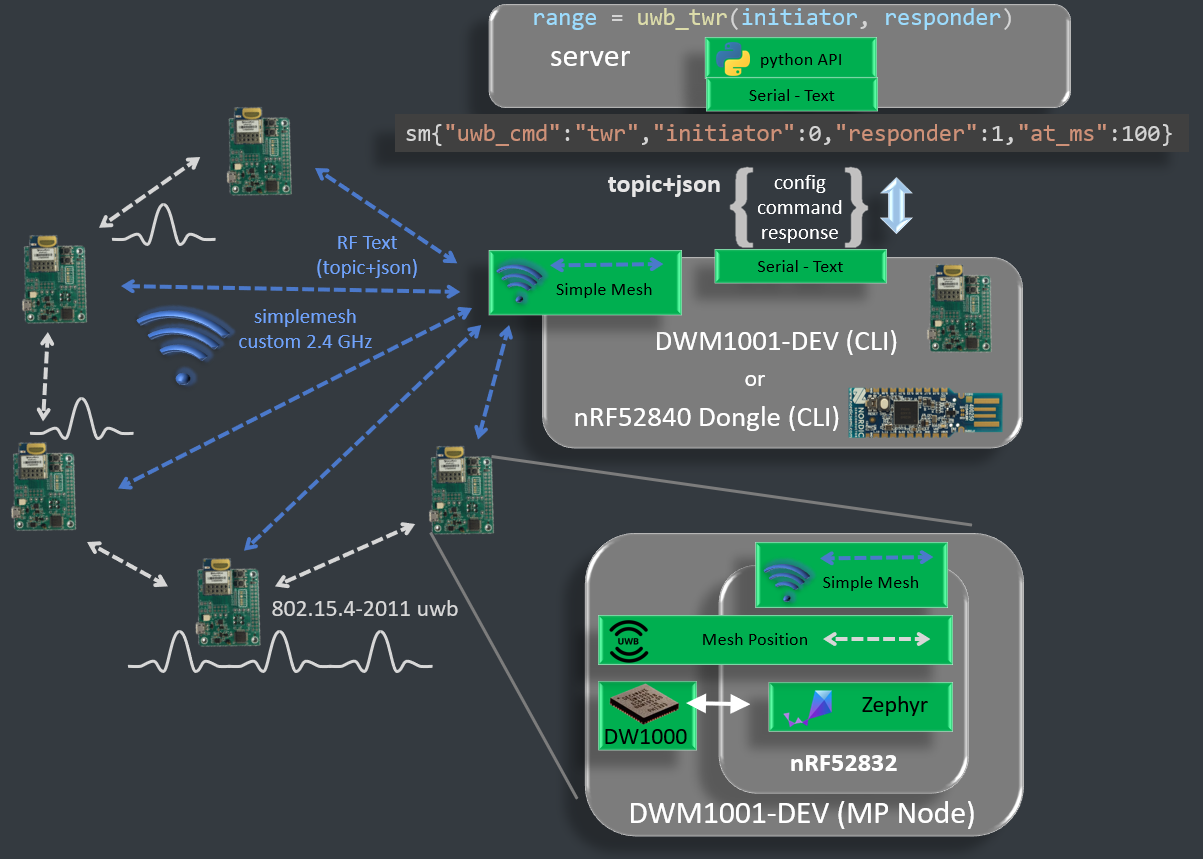
mesh positioning framework.This framework is developed as part of the
Home Smart Mesh project. It provides a python API on top of a simplemesh custom RF REST API. This REST API can generate a dynamic, request specific TDMA layer for performing a long sequence of basic uwb commands that wraps dwt_ functions.The
simplemesh communication layer is a permanent channel between all nodes and the server that can for example in one command set different nodes in different uwb channels config and roles independently of their current uwb channel. Nodes Preparation
MP Nodes
MP as Mesh Position nodes perform uwb commands in any role specified by the request, they also apply config and provide responses
west init -m https://github.com/nRFMesh/sdk-uwb-zephyr --mr main
cd uwb/samples/06_uwb_node_sm
west build -b decawave_dwm1001_dev -- -DCONF_FILE=prj.conf
west flash
west flash --snr 760130093
west flash --snr 760130128 Simpl Mesh CLI Node
The back-channel commands and configuration of uwb modes is based on
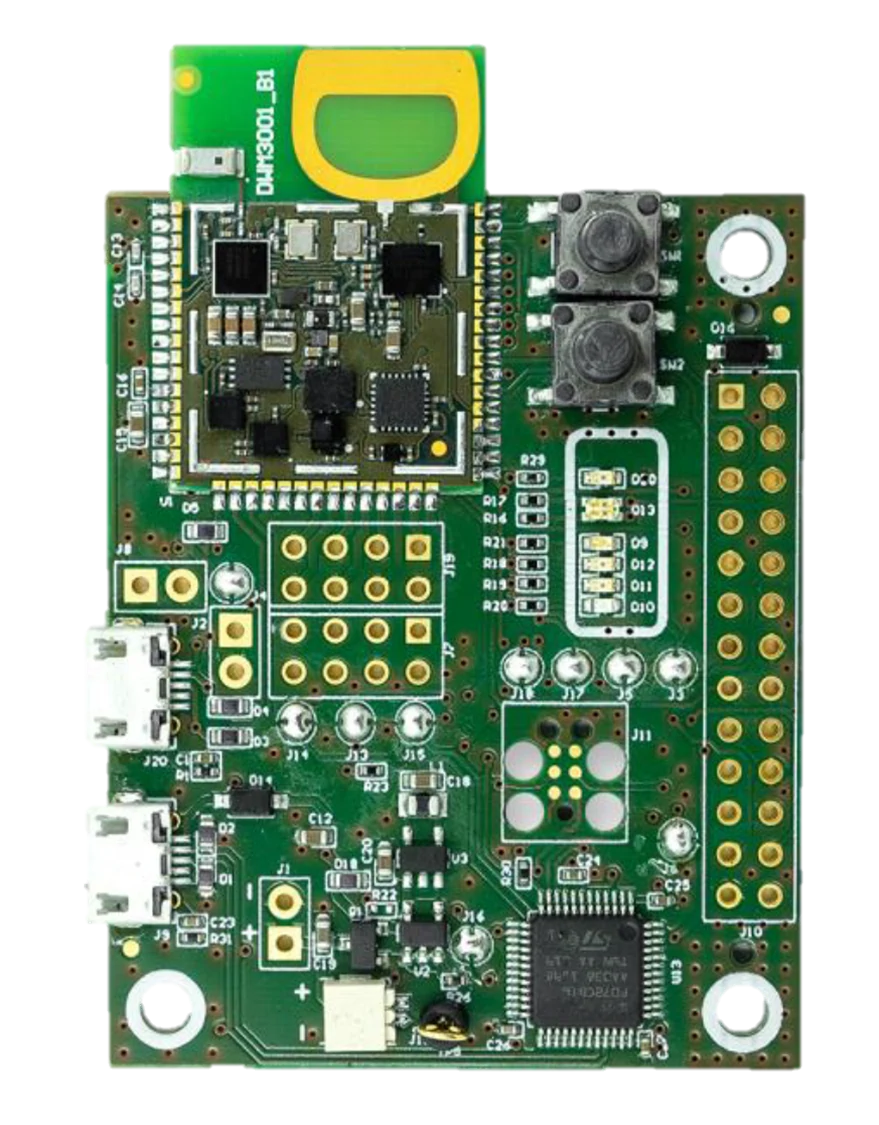
simplemesh. Both boards are supported by the cli sample nrf52840dongle_nrf52840 and decawave_dwm1001_dev but the dwm1001 has a better responsible uart console.
west init -m https://github.com/HomeSmartMesh/sdk-hsm-sensortag -mr main
cd hsm/samples/simplemesh_cli
west build -b decawave_dwm1001_dev -- -DCONF_FILE=prj-dwm.conf
west flash
west flash --snr 260103215 Python Usage
- Two Way Ranging single operation
initiator = 0
responder = 1
range_measure = uwb_twr(initiator, responder)
print(f"mp> test ({initiator})->({responder}) range = {range_measure}")- Two Way Ranging sequence of operations
initiator = 0
responders = [1, 2, 3, 4]
result_list = uwb_twr(initiator=initiator, responders=responders, step_ms=10)
for res in result_list:
print(f"mp> ({res['initiator']})->({res['responder']}) range= {res['range']}")- Ping diagnostic
pinger = 0
target = 1
diag = uwb_ping_diag(pinger, target)
print(f"test_uwb_ping> ({pinger})->({target}) stdNoise = {diag['stdNoise']}")for more details and example measures see the database section
Text Console Usage
The cli node can take user console input commands, send them through
simplemesh network and outputs results coming from the network. DWT Config
request to node with uid, the node responds with the full dwt config
>sm/98501ED22B42EB41{"dwt_config":{"chan":5}}
>sm/98501ED22B42EB41{"chan":5,"dataRate":"DWT_BR_6M8","nsSFD":"NonStandard","phrMode":"DWT_PHRMODE_EXT","prf":"DWT_PRF_64M","rxCode":9,"rxPAC":"DWT_PAC8","sfdTO":129,"txCode":9,"txPreambLength":"DWT_PLEN_128"}It is also possible to broadcast the config to all nodes with
sm{payload} only at heading topic not sm/uid{payload}, in this case both nodes respond with the new full config>sm{"dwt_config":{"chan":5}}
>sm/E8D81FEE52C283EB{"chan":5,"dataRate":"DWT_BR_6M8","nsSFD":"NonStandard","phrMode":"DWT_PHRMODE_EXT","prf":"DWT_PRF_64M","rxCode":9,"rxPAC":"DWT_PAC8","sfdTO":129,"txCode":9,"txPreambLength":"DWT_PLEN_128"}
sm/98501ED22B42EB41{"chan":5,"dataRate":"DWT_BR_6M8","nsSFD":"NonStandard","phrMode":"DWT_PHRMODE_EXT","prf":"DWT_PRF_64M","rxCode":9,"rxPAC":"DWT_PAC8","sfdTO":129,"txCode":9,"txPreambLength":"DWT_PLEN_128"} TWR command
- simple
Two Way Rangingthe below command broadcasts a request to all nodes, and each node identified by its short id, will execute the corresponding twr transaction asinitiatoror asresponder.
sm{"uwb_cmd":"twr","initiator":0,"responder":1,"at_ms":100}
sm/C24FD51212E905F0{"initiator":0,"range":"0.375","responder":1,"seq":0,"uwb_cmd":"twr"}full example of cli input and output
In this example, every simplemesh node starting reserves a short address. The first node starting checks the existance of a corrdinator by calling
node_id_get if no responce is obtained, the node turns into a coordinator and assigns to itself the node id 0. The second node starting requests a node id and obtains the node id 1 from the coordinator. Each starting node broadcasts its dw1000 tranceiver config and its simplemesh node id.>node_id_get:98501ED22B42EB41
node_id_get:98501ED22B42EB41
node_id_get:98501ED22B42EB41
sm/98501ED22B42EB41{"shortid":0}
sm/98501ED22B42EB41{"simplemesh":"started"}
sm/98501ED22B42EB41{"chan":5,"dataRate":"DWT_BR_6M8","nsSFD":"NonStandard","phrMode":"DWT_PHRMODE_EXT","prf":"DWT_PRF_64M","rxCode":9,"rxPAC":"DWT_PAC8","sfdTO":129,"txCode":9,"txPreambLength":"DWT_PLEN_128"}
node_id_get:E8D81FEE52C283EB
node_id_set:E8D81FEE52C283EB:01
sm/E8D81FEE52C283EB{"simplemesh":"started"}
sm/E8D81FEE52C283EB{"shortid":1}
sm/E8D81FEE52C283EB{"chan":5,"dataRate":"DWT_BR_6M8","nsSFD":"NonStandard","phrMode":"DWT_PHRMODE_EXT","prf":"DWT_PRF_64M","rxCode":9,"rxPAC":"DWT_PAC8","sfdTO":129,"txCode":9,"txPreambLength":"DWT_PLEN_128"}
>sm{"twr_command":{"initiator":0,"responder":1,"at_ms":100}}
>sm/E8D81FEE52C283EB{"at_ms":100,"initiator":0,"responder":1,"result":{"range":"0.211"}}
sm{"twr_command":{"initiator":0,"responder":1,"at_ms":100}}
>sm/E8D81FEE52C283EB{"at_ms":100,"initiator":0,"responder":1,"result":{"range":"0.220"}}- sequence
Two Way Raningallows to provide a list for each of theinitiatorsorresponders
Request:
sm{"uwb_cmd":"twr","initiator":4,"responders":[0,1,2,3],"at_ms":100,"step_ms":10,"count":3,"count_ms":50}Responses:
sequence of the (4x3 = 12) TWR responses
sm/90A971A3D1A1B648{"initiator":4,"range":"0.305","responder":0,"seq":0,"uwb_cmd":"twr"}
sm/C24FD51212E905F0{"initiator":4,"range":"0.614","responder":1,"seq":1,"uwb_cmd":"twr"}
sm/98501ED22B42EB41{"initiator":4,"range":"0.005","responder":2,"seq":2,"uwb_cmd":"twr"}
sm/E8D81FEE52C283EB{"initiator":4,"range":"0.178","responder":3,"seq":3,"uwb_cmd":"twr"}
sm/90A971A3D1A1B648{"initiator":4,"range":"0.310","responder":0,"seq":4,"uwb_cmd":"twr"}
sm/C24FD51212E905F0{"initiator":4,"range":"0.591","responder":1,"seq":5,"uwb_cmd":"twr"}
sm/98501ED22B42EB41{"initiator":4,"range":"0.038","responder":2,"seq":6,"uwb_cmd":"twr"}
sm/E8D81FEE52C283EB{"initiator":4,"range":"0.183","responder":3,"seq":7,"uwb_cmd":"twr"}
sm/90A971A3D1A1B648{"initiator":4,"range":"0.319","responder":0,"seq":8,"uwb_cmd":"twr"}
sm/C24FD51212E905F0{"initiator":4,"range":"0.577","responder":1,"seq":9,"uwb_cmd":"twr"}
sm/98501ED22B42EB41{"initiator":4,"range":"0.019","responder":2,"seq":10,"uwb_cmd":"twr"}
sm/E8D81FEE52C283EB{"initiator":4,"range":"0.169","responder":3,"seq":11,"uwb_cmd":"twr"}Another request
sm{"uwb_cmd":"twr","initiator":0,"responders":[1,1],"at_ms":100,"step_ms":10,"count":10,"count_ms":50}In the figure below we can see a gpio debug output from the two uwb modules. The initiator is asking the same responder twice, and then repeats the same for x10 times with a period of 50 ms.

×
RF Mesh Diagnosis
pingcommand and response. The goal is to evaluate the link between the cli and one uid node :rssi51 => -51 bBm- time in os ticks where 1 ms = 32 ticks
>sm/1CF6567337562176{"rf_diag":"ping"}
>sm/1CF6567337562176{"rf_diag":"pong","rssi":51,"time":197086}ping_targetcommand and responses. The goal is to evaluate the link between two uid nodes :- the user pastes and broadcasts the command from the cli on the pinger uid
1CF6567337562176topic - the pinger node
1CF6567337562176recognises itself and broadcasts apingcommand on the target uidCBC216DC164B1DE8topic - the pinger provides a response where
rssiandtimerelate to the cli -> pinger rx message - The target of the
pingrequest (2.) (CBC216DC164B1DE8) broadcasts apongresponse whererssiandtimerelate to the ping rx message (1CF6567337562176->CBC216DC164B1DE8)
1. >sm/1CF6567337562176{"rf_diag":"target_ping","target":"CBC216DC164B1DE8"}
2. >sm/CBC216DC164B1DE8{"rf_diag":"ping"}
3. sm/1CF6567337562176{"rf_diag":"pinger","rssi":52,"time":4200857}
4. sm/CBC216DC164B1DE8{"rf_diag":"pong","rssi":41,"time":3898403} UWB Diagnosis
pingcommand and response. In this case, the ping request is a packet sent throughsimplemesh(2.4 GHz RF) to thepingernode, which then sends an UWB packet to thetargetnode- the response contains collected data from the DW1000 registers and sent as a
simplemeshresponse packet. For details seeDW1000_Software_API_Guide_rev2p7.pdf dwt_readdiagnosticsfpAmp1the leading edge signal from the LDE accumulatorfpAmp2same for index floor firstpath+2fpAmp3same for index floor firstpath+3maxGrowthCIRChannel Impulse Response Max Growth related to the receive signal power.maxNoisepeak maximum NoiserxPreamCountnumber of symbols accumulated for the preamblestdNoisestandard deviation of the noise level
sm{"uwb_cmd":"ping", "pinger":0,"target":1,"at_ms":100}
sm/C24FD51212E905F0{"diag":{"fpAmp1":7196,"fpAmp2":7220,"fpAmp3":6969,"maxGrowthCIR":1995,"maxNoise":1495,"rxPreamCount":118,"stdNoise":64},"uwb_cmd":"ping"}This command can also be requested to be run a
count number of times each count_ms taken as periodsm{"uwb_cmd":"ping", "pinger":0,"target":1,"at_ms":100,"count":3,"count_ms":6}
sm/C24FD51212E905F0{"diag":{"fpAmp1":4771,"fpAmp2":7206,"fpAmp3":7313,"maxGrowthCIR":2091,"maxNoise":1516,"rxPreamCount":124,"stdNoise":68},"uwb_cmd":"ping"}
sm/C24FD51212E905F0{"diag":{"fpAmp1":7344,"fpAmp2":7710,"fpAmp3":7008,"maxGrowthCIR":2146,"maxNoise":1712,"rxPreamCount":118,"stdNoise":68},"uwb_cmd":"ping"}
sm/C24FD51212E905F0{"diag":{"fpAmp1":6346,"fpAmp2":6986,"fpAmp3":6808,"maxGrowthCIR":1976,"maxNoise":1339,"rxPreamCount":124,"stdNoise":60},"uwb_cmd":"ping"} Database
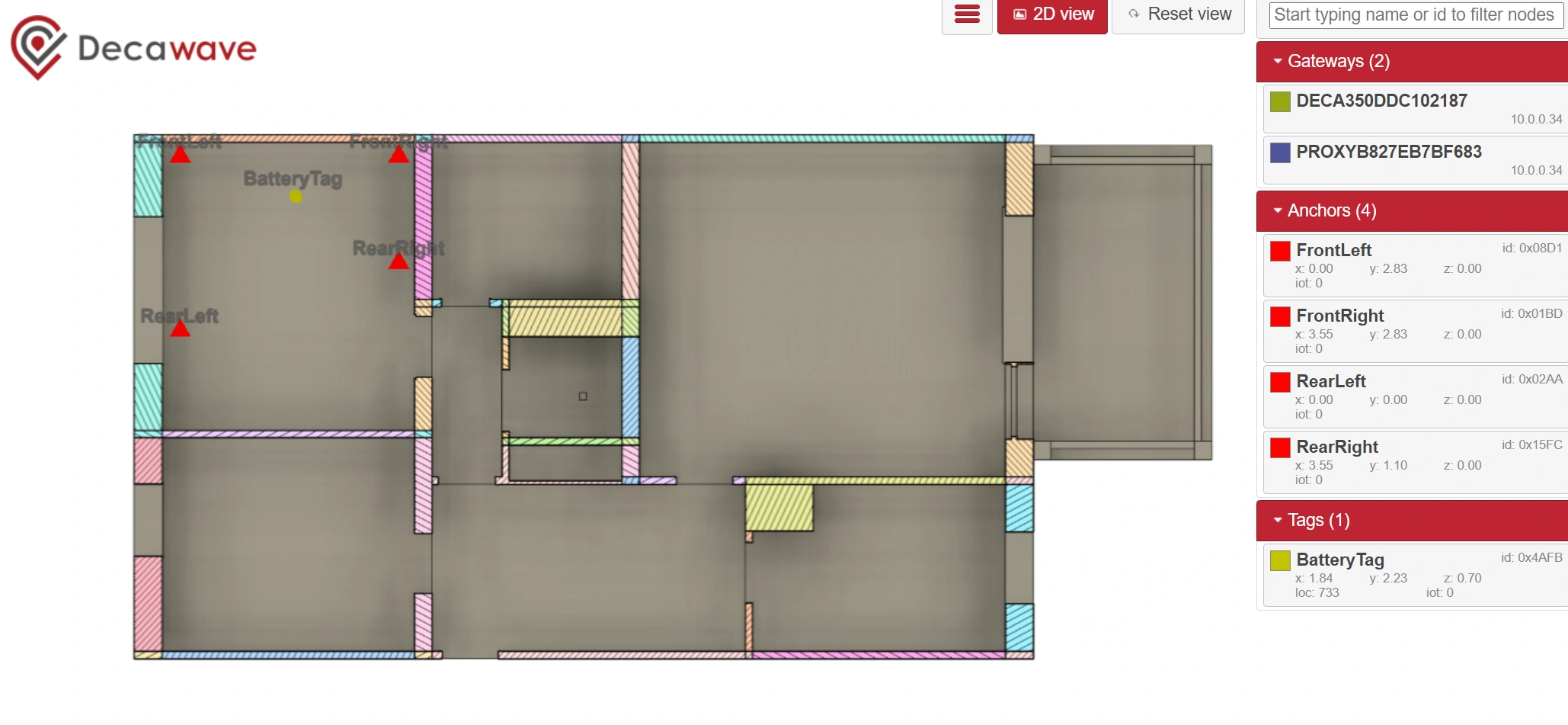
- Ground Truth.
All nodes are in line of sight and facing the vector x direction. Below is the nodes coordinates table (all units in meter).
| Node | id | x | y |
|---|
Tag to Anchors distance = sqrt(sqr(0.75)+sqr(0.75)) = 1.06 m
Given the non perfect placement of the tag and anchors, a more precise measure of the distances is are as follow
- 0-1 : 1.01 m
- 0-2 : 1.01 m
- 0-3 : 1.05 m
- 0-4 : 1.04 m
- Two Way Ranging
tag ranging four anchors TWR double sided x3 times each
[
{
"initiator": 0,
"range": "1.065",
"responder": 1,
"seq": 0
},
{
"initiator": 0,
"range": "1.004",
"responder": 2,
"seq": 1
},
{
"initiator": 0,
"range": "1.210",
"responder": 3,
"seq": 2
},
{
"initiator": 0,
"range": "1.187",
"responder": 4,
"seq": 3
},
{
"initiator": 0,
"range": "1.093",
"responder": 1,
"seq": 4
},
{
"initiator": 0,
"range": "0.947",
"responder": 2,
"seq": 5
},
{
"initiator": 0,
"range": "1.219",
"responder": 3,
"seq": 6
},
{
"initiator": 0,
"range": "1.177",
"responder": 4,
"seq": 7
},
{
"initiator": 0,
"range": "1.069",
"responder": 1,
"seq": 8
},
{
"initiator": 0,
"range": "1.008",
"responder": 2,
"seq": 9
},
{
"initiator": 0,
"range": "1.196",
"responder": 3,
"seq": 10
},
{
"initiator": 0,
"range": "1.154",
"responder": 4,
"seq": 11
}
]- Ping Diagnostic, below an example of the result json format with two entries only. The database below available for download contains 586 ping diagnostic measures
tag ping diagnostic four anchors
[
{
"pinger": 0,
"target": 1,
"diag": {
"fpAmp1": 6699,
"fpAmp2": 6986,
"fpAmp3": 5772,
"maxGrowthCIR": 1953,
"maxNoise": 908,
"rxPreamCount": 120,
"stdNoise": 40
},
"seq": 0
},
{
"pinger": 0,
"target": 1,
"diag": {
"fpAmp1": 7886,
"fpAmp2": 7867,
"fpAmp3": 6459,
"maxGrowthCIR": 3164,
"maxNoise": 1725,
"rxPreamCount": 122,
"stdNoise": 68
},
"seq": 1
}
] Features
- Using west with a connected zephyr version dependency and a deca driver integration that can be enabled with the flag
CONFIG_DW1000=y - using the already available board in Zephyr
decawave_dwm1001_devinstead of the locally declared boardnrf52_dwm1001 - adding custom mesh network functionality. The issue is that testing UWB should have another independent communication and configuration channel. Normal Bluetooth cannot cover a big network so a mesh is needed. nRF52832 do not support openthread and Bluetooth Mesh is a big overhead compared to the simplemesh
- adding a higher level API to greatly simplify TWR applications and others by eliminating redundant blocks in the code and fitting the whole ranging sequence on a single screen function, the new API MP as
meshpositioningincludesmp_receive()that is overloaded with the structure type intended to be received,mp_request()when sending a struct and expecting a response . Also for when initiating a delayed transmission either expecting a responsemp_request_at()or notmp_send_at() - support for C++17 and standard library e.g. string, list, map. Now before the C / C++ skepticism takes over, please consider that C++ shall not be used in a real time system without knowing how C++ works. e.g. bad C++ is adding constructor without knowing when where are resources allocated. good C++ is using typed enums, any compile time typing verifications and dead simple iteration loops.
- using nlohmann/json JSON for Modern C++ for remote procedure call e.g. an uwb listener has an MQTT interface where an app throws a json config sent over simplemesh to use with dwt_configure() verbose target log for status register thanks to a simple map flag to string
TWR GPIO Profiling
- samples used
uwb\samples\twr_initiatoranduwb\samples\twr_responder - Debug PIO used
[nRF52] P0.13=>M_PIN17=>J7 pin 8 - Debug function calls
APP_SET;andAPP_CLEAR;
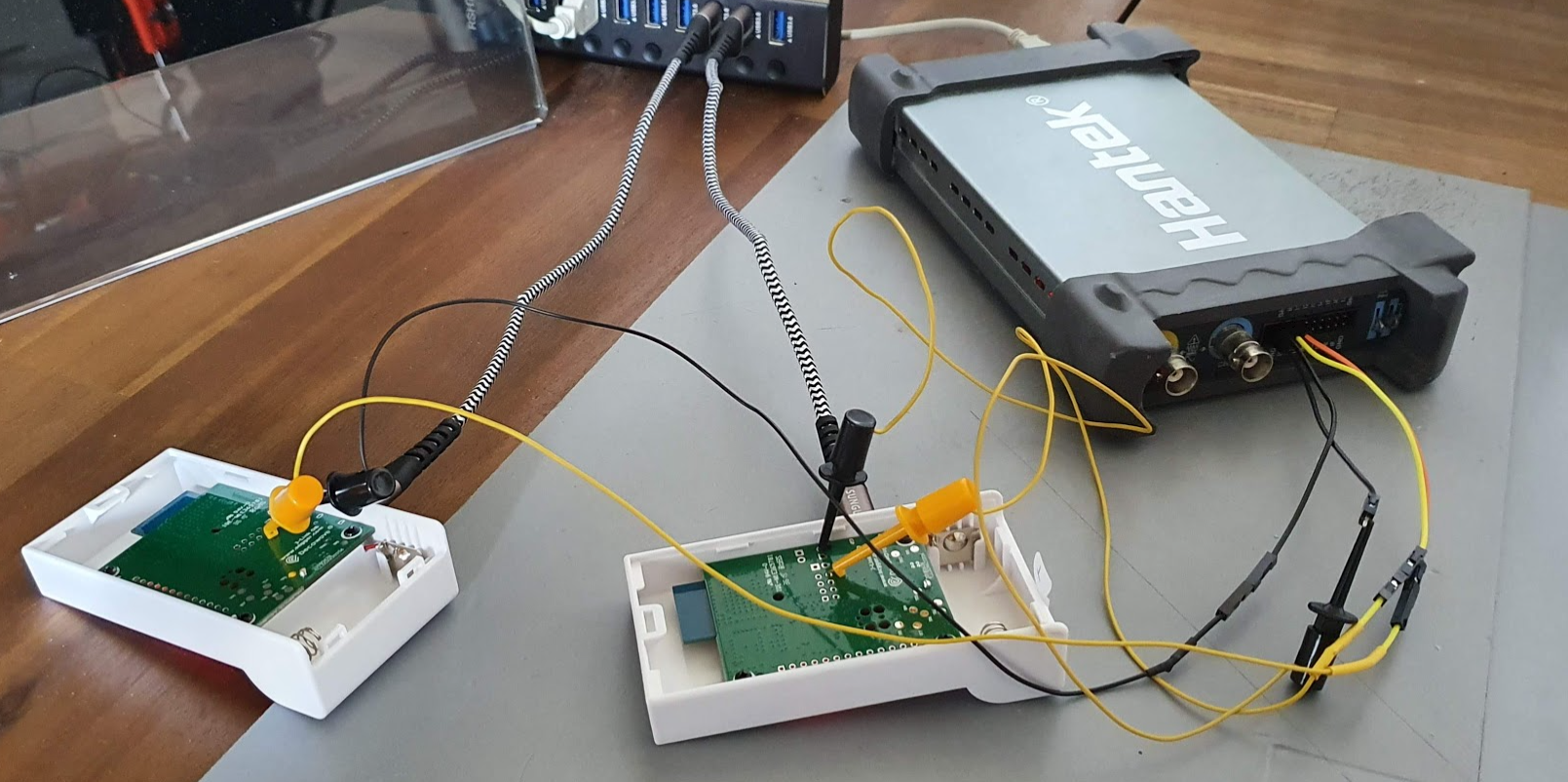
- in the screenshot below we can profile a Two Way Ranging cycle
- The initiator has two pulses
- from first immediate TX until resp RX
- from intiating the delayed final TX until it is actually transmitted
- The responder has three pulses
- blocked on RX listening until the first poll message is received
- from initiating the delayed response transmittion including its actual transmission and then waiting till the reception of the final RX
- does not include RF transaction and is simply to monitor the time it takes to compute the double precision distance computation

×
the screenshot was made from the below commit which is a separate branch not including functional refactoring although the main line refactoring showed similar timings
Hardware
RTLS Gen 2
DWM3001 cdk
- form factor 65 mm x 45 mm (single board)
- on board debugger and battery power management
- DW3110 from the DW3000 IC family
IEEE 802.15.4z,IEEE802.15.4-2015 UWB,... - on board host nRF52833 capable of Thread and Bluetooth Mesh and Direction finding
DWM3000 evb
This part number has been renamed from 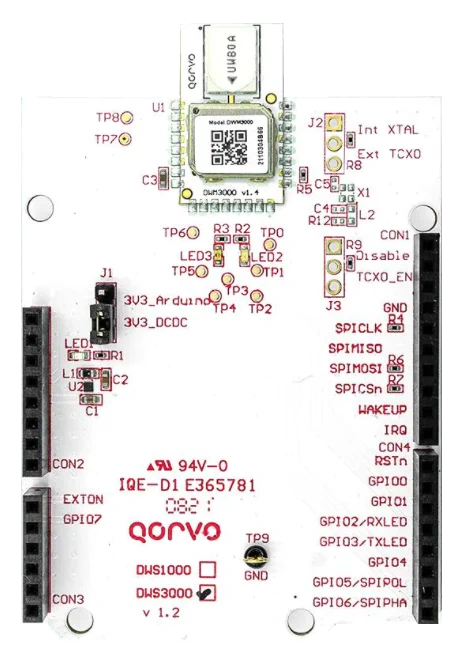
DWS3000 to DWM3000 evb
- Arduino shield form factor (+ module antenna) 80 mm x 54 mm (to be stacked over host board)
- DW3110 from the DW3000 IC family
IEEE 802.15.4z,IEEE802.15.4-2015 UWB,... - supported hardware reference platforms
nRF52840-DKandnucleo-F429ZI.
for software see the Software / DWM3000 evb section.
RTLS Gen 1
×
- DRTLS : DWM1001 Two-Way-Ranging RTLS
- RTLS : Real Time Locating System
- PANS : Positioning and Netowrking Stack
- eCos : Free Open source Real-Time Operating-System
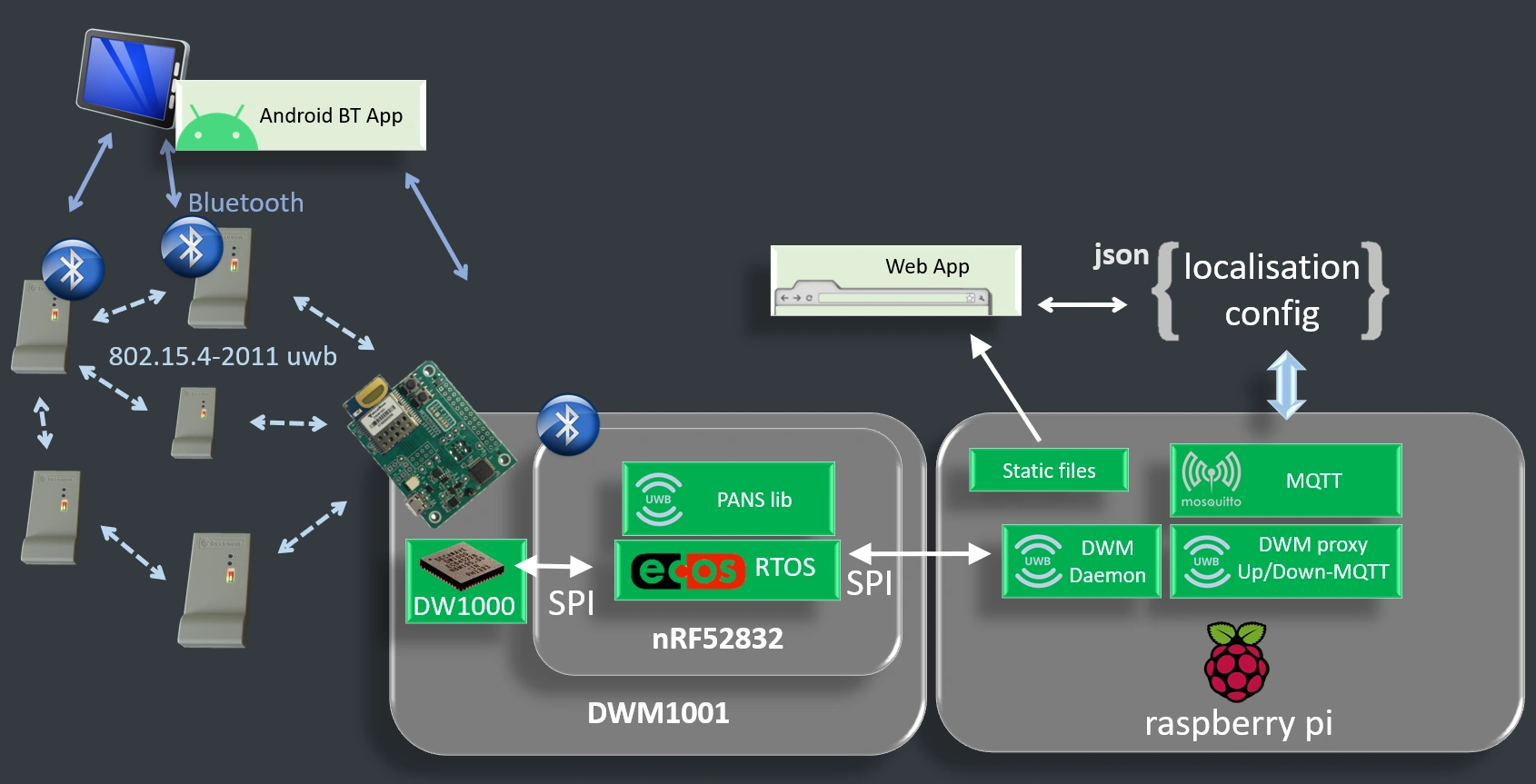
Decawave provides a ready to use localisation system based on a preflashed
DWM1001_PANS_R2.0.hex firmware. The functional concept is described in DWM1001 System Overview and Performance.pdf including the time division protocol and the format of all the 802.15.4 Frames.UWM Chips available from Decawave, now Qorvo. Qorvo is also the supplier of Apple UWB chips.

DW Tranceiver
available in a Decawave webpage
- User Manual : latest version 2.18 as of May 2021
- Transmission, Reception, MAC features, Calibration,...
application note and datasheet from forum post (note the datasheet on the product page is version 1.8)
SDK available from Decawave uploads as zip
- document User Guide :
dw1000_api_rev2p14\dw1000_api_rev2p14_stsw\DW1000_Software_API_Guide_rev2p7.pdf - source code decadriver :
DW1000 Device Driver Version 05.01.00 - ported to STM32 platforms
coocoxandstsw
Software Survey
Below a list of existing closed firmware delivered as binary only and open source official and community projects :
- Production Firmware : available as precompiled binary
DWM1001_PANS_R2.0.hexin order to recover the Module for production grade certified applications - PANS library : All the main functions performed by the module (TWR, RTLS, Bluetooth, 802.15.4) are provided as a library on top of which a user nRF52832 application can be built.
- PANS library API : described in
DWM1001-Firmware-User-Guide.pdfandDWM1001-API-Guide.pdf - Open Source Firmware : multiple examples are provided to kick start development
out of the box config
system information log
DWM1001 TWR Real Time Location System
Copyright : 2016-2019 LEAPS and Decawave
License : Please visit https://decawave.com/dwm1001_license
Compiled : Jun 7 2019 18:00:03
Help : ? or help
dwm> si
[000042.580 INF] sys: fw2 fw_ver=x01030001 cfg_ver=x00010700
[000042.580 INF] uwb0: panid=x0000 addr=xDECA50BFBF5001D2
[000042.590 INF] mode: tn (pasv,twr,np,le)
[000042.590 INF] uwbmac: disconnected
[000042.590 INF] uwbmac: bh disconnected
[000042.600 INF] cfg: sync=0 fwup=0 ble=1 leds=1 le=1 lp=0 stat_det=1 (sens=1) m ode=0 upd_rate_norm=1 upd_rate_stat=100 label=DW01D2
[000042.610 INF] enc: off
[000042.610 INF] ble: addr=E0:69:AF:07:D2:94DWM1001_PANS_R2.0.hexhas the same firmware version but compiled on a different dateCompiled : Mar 27 2019 03:35:59
Firmware recovery
nrfjprog -f nrf52 --program DWM1001_PANS_R2.0.hex --sectorerase --verify Product Page
DWM1001
PANS binary library for nRF52832 module
- Path
v9_dwm_on_board_package/examples: dwm-api-test, dwm-range-iot, dwm-simple, dwm-sniffer, dwm-timer, dwm-uart - API 2.2, Firmware 1.3.0 :
DWM1001 PANS Library Version 1.3.0 - Transciever API not exposed, used by the library as dwm_ functions provided as binary files
dwm.o,libdwm.a,... - available
.emProjectproject files for Segger Studio - based on
Nordik SDKversion12.1.0 - Used
GNU Tools ARM Embeddedversion5.4 2016q3
DWM3000
Software for the DWM3000 evb hardware.
The Decawave product page provides a package of documentation and software
- supported hardware reference platforms
nRF52840-DKandnucleo-F429ZI. The nucleo requires a hardware modification- STM32 Cube MX project for
nucleo-F429ZI - SES emProject for
nRF52840-DKusing nRF5 SDK version 16.0.0
Decawave Github
Transciever driver DW1000 for nRF52
- Path
dwm1001-examples/examples/: ss_twr_init, ss_twr_init_int, ss_twr_resp, twi_accel - DWM1001 board definition (leds, buttons,...)
- based on
Nordik SDKversion14.2.0 - decadriver :
DW1000 Device Driver Version 04.00.06
Variant on top of dwm1001-examples
Academit project from the TIERS University of Turku Finland. The integration is arcaic and requires manual replacement of files, based on old SES and ARM toolchain versions. The content has value nevertheless and includes code for
Autocalibration, Localization and Measurements. In each example, the Initiator and responders are in different firmwares. the measurement includes a python script that has among others rospy as dependency, therefore has a robotics application scope. Github mynewt
- examples : sniffer, OTA, TWR, TDOA,...
- running over Apache's myNewt Operating System which comes with code for BT, network,...
Zephyr Mainline
- module port as
decawave_dwm1001_devboard with.dts - transciever driver
decawave,dw1000integrated in the spi dts entry - no uwb specific positioning code
Zephyr Community
- using custom board
nrf52_dwm1001 - Path
dwm1001/examples - ex_01 ... ex_14 (simple, sleep, sniff, twr, low power, accell,...)
- decadriver
DW1000 Device Driver Version 05.01.00 - logs through RTT and serila
Zephyr with Bluetooth
Arm mbed
The search for dw1000 on the arm mbed registry returns 4 results, some more popular than others in terms of imports but also older with last update between 2015 - 2017.
Two are worth mentioning,
AndyA DW1000 is nicely wrapped c++ driver the mbed way built on top of the BurstSPI.lib, but unfortunately does not come with examples, the Author though is active on the Decawave forum answering general questions and giving valuable feedback. Grob&Stalder Decawave with a DW1000 driver but also simple and two way ranging layer. Arduino
- No longer maintained
- not supporting all functions, e.g. antenna calibration
- License : Apache 2.0
- TWR
- Fork of
arduino-dw1000 - License : MIT
- TWR
Decawave Raspberry pi software
- DWM Daemon
- DWM Proxy
- webapp http server
- dwm device on
/dev/dwm0
check that your raspberry pi is a model 3b not b+ with 100 Mbit only with
sudo ethtool eth0 | grep Speed, which is important for the real time operation of the services. DWM Daemon
- service :
dwm1001.service - log :
/var/log/dwm-daemon.log - config :
/etc/dwm1001/dwm1001.config
DWM Proxy
- service :
dwm1001-proxy.service - config :
/etc/dwm1001/dwm1001-proxy.config
Decawave Webapp
- the webapp is provided on the raspberry pi on the path
/var/www/html/. - The webapp is based on three.js which is a viable choice for 3d gemoetry calculations of anchors and tag coordinates.
- The view is limited to an orthogonal projection which makes the app 2d only. Although the created tags and anchros are actual 3d meshes, only 2d shapes appear on the screen.
- The down side of 3d is the need for ray casting to create click events on objects. But on the upside it's a frameowrk that can easily extend to 3D models. Maybe for the future, Decawave will get inspired by the smart home 3d webapp project.
- The menus are handled with injected jquery html with classes.
- All in all, this webapp is an amazing user experience and a reference for open design, that's how all mdoern apps should be
An easy upload function allows to customize the view with an own floor map. The offset and scale is not easy but manageable
MQTT Config
The decawave webapp communicates with all devices through the 802.15.4-uwb mesh network to send and receive configuration. For that purpose, the IOT Data message is used as config request and response packets.
- Details of the IoT Data message are provided in
DWM1001_System_Overview.pdfsection9.1.12 IOT Data message - config can be updated by sending a request
- topic
dwm/node/<nodeid>/downlink/config - 802.15.4-uwb downlink message id
UWBMAC_FRM_TYPE_DL_IOT_DATA
- config is received by a response
- topic
dwm/node/<nodeid>/uplink/config - 802.15.4-uwb uplink message id
UWBMAC_FRM_TYPE_UL_IOT_DATA
given that the response is a confirmation it will have a payload similar as the request
example Anchor config downlink
{
"configuration": {
"label": "RearRight",
"nodeType": "ANCHOR",
"uwbFirmwareUpdate": false,
"leds": false,
"ble": false,
"anchor": {
"routingConfig": "ROUTING_CFG_OFF",
"initiator": false,
"position": {
"x": 3.5500002,
"y": 1.1,
"z": 0,
"quality": 100
}
}
}
}example Tag config downling
{
"configuration": {
"label": "BatteryTag",
"nodeType": "TAG",
"uwbFirmwareUpdate": false,
"leds": false,
"ble": false,
"tag": {
"locationEngine": true,
"responsive": true,
"stationaryDetection": true,
"nomUpdateRate": 100,
"statUpdateRate": 2000
}
}
} Standard
References
FAQ - Discussion
- Support should be available from the official forum. Reviews, experience exchange and ideas related to this page content can be discussed in the forum category
:::Details{summary="Can the DWM1001C firmware be modified ?"
It is possible to flash any firmware on the nRF52832 uC host of the DWM1001C and in case of need Decawave provides the orginal PANS firmware as a .hex to recover the original functionality. The PANS though is only provided as binary program and binary library. It is possible to add a custom app code on top but the content of the PANS lib cannot be modified, or at least is not intended to be modified. :::
It is possible to flash any firmware on the nRF52832 uC host of the DWM1001C and in case of need Decawave provides the orginal PANS firmware as a .hex to recover the original functionality. The PANS though is only provided as binary program and binary library. It is possible to add a custom app code on top but the content of the PANS lib cannot be modified, or at least is not intended to be modified. :::
Where does the PANS library run ?
The PANS library runs on the host microcontroller in the case of the DWM1001 the nRF52832. It is built on top of ecos RTOS.